Determináns (matematika)
 | Ez a szócikk a matematikai determinánsról szól. Hasonló címmel lásd még: Determináns (nyelvészet). |
A determináns egy négyzetes mátrixokhoz rendelt szám. Hozzárendelésének tulajdonságait a mátrixok alaptestének tulajdonságai határozzák meg. A vegyes szorzat általánosítása magasabb dimenziókra. Multivektorok pszeudoskalár komponense, amely az elemi térfogat nagyságát és irányítását adja meg.
Definíció (axiomatikusan)
Legyen test, négyzetes mátrix és függvény. A mátrix determinánsának nevezzük -t, ha a hozzárendelést az alábbi négy axióma írja le:




1. homogén, azaz: 2. additív, 3. alternáló, 4. az egységmátrix determinánsa 1,




Ahol:
- skalár, a mátrix oszlopait leíró vektor,
- rendre a vektortéren definiált skalárral való szorzás és additív művelet,
- az -edik egységvektor/bázis.






A leképezés a mátrix oszlopvektorain értelmezett n-változós függvényként értelmezhető (). Az első kettő axiómával egy multilineáris, a harmadikkal egy antiszimmetrikus forma/funkcionál.

Az axiómák egyértelműen meghatározzák a leképezést. Egy másik függvény, amely kielégíti a fenti négy tulajdonságot azonos -tel. Más megfogalmazásban az adott szabályokkal tetszőleges mátrixhoz egyértelmű értéket tudunk rendelni.


A harmadik axióma helyett állhatna az is, hogy két tetszőleges oszlopot megcserélve a determináns -szeresére változik. Az -edik és -edik oszlop cseréje darab szomszédos oszlopcserével elérhető és .




esetén n-ed rendű determinánsról beszélünk. Az esetek többségében a valós () vagy komplex () számok halmaza.


Definició (Leibniz-formulával)
Legyen test, négyzetes mátrix és függvény. A mátrix determinánsának nevezzük -t, ha a hozzárendelést az alábbi formula írja le:
- .

Ahol:
- a mátrix -edik sorában és -edik oszlopában lévő elem,
- (szigma) az elemek egy permutációja,
- a permutáció inverziószáma.




A determinánsra adott két definíció ekvivalens.
A produktum a mátrix minden sorából és oszlopából kiemel pontosan egy elemet és n-tényezős szorzatokat alkot. A szumma megfelelő előjellel összegzi az összes lehetséges n-tényezős szorzatot. A képzett összeg tagszáma n faktoriálissal egyenlő.
Az inverziószám hivatott kifejezni, hogy a permutáció minimálisan hány cserére van az eredeti sorrendtől. Ha egy adott sorrend páratlan cserével elérhető, akkor párossal nem, és fordítva.
Az inverziószámmal történő hatványozás helyett a Levi-Civita-szimbólum segítségével is felírható a formula, mely lényegében ugyanazt fejezi ki.
Aldetermináns definíciója
Egy mátrix egyes sorainak és oszlopainak a törlésével kapott -es négyzetes mátrix determinánsát az egy m-ed rendű aldeterminánsának nevezzük.



Egy négyzetes mátrix -edik sorának és -edik oszlopának a törlésével kapott -es négyzetes mátrix determinánsát az mátrix eleméhez tartozó aldeterminánsának nevezzük. Elemhez tartozó mátrix jelölése: .


Egy mátrix néhány sorának és oszlopának levágásával kapott -es négyzetes mátrix determinánsát az egy m-ed rendű sarokdeterminánsának nevezzük. Bal felső sarokdetermináns, jobb alsó sarokdetermináns, stb.
Jelölése
A determináns néhány szokásos jelölése:
- a mátrix megadásával: , ;
- vektorrendszerrel: ;
- mátrix oszlopvektoraival: ;
- a mátrixelemek megadásával: , illetve .






Tételek
1. Ha két oszlop megegyezik, akkor a determináns .

- 3. axióma: .
- .
- .



2. Nem változik a determináns, ha az egyik oszlopból egy másik oszlop skalárral vett szorzatát levonjuk/hozzáadjuk.
- 2. axióma: .
- 1. axióma: .
- 1. tétel: .



3. Ha az egyik oszlop a nullvektor, akkor a determináns is .
- 2.tétel: .
- 1.tétel: .


4. Egy oszlop nem nulla skalárral való szorzása, két oszlop felcserélése és egyik oszlophoz egy másik oszlop skalárral való szorzatának hozzáadása nem változtat a determináns nulla voltán.
- 1. axióma: nem nulla skalár kiemelése a determinánst nem nullával szorozza.
- 3. axióma: két oszlop felcserélése a determinánst -gyel szorozza.
- 2. tétel: nem változik a determináns, ha egyik oszlophoz egy másik oszlop skalárral való szorzatát adjuk.
5. A determináns akkor és csak akkor , ha a vektorok lineárisan összefüggőek.
- Ha lineárisan összefüggő akkor :
- Összefüggőség: .
- 2. tétel: .
- 3. tétel: .



- Ha lineárisan független, akkor nem :
- Függetlenség: A mátrix tetszőleges oszlopában biztosan található egy nem nulla elem. Ellenkező esetben az oszlopvektorok lineárisan összefüggenének. Legyen ez az .
- 4. és 10. tétel: A -edik oszlopból kiemeljük az -t, azaz az oszlopot megszorozzuk az reciprokával. Az új . Lenullázzuk a -edik sor, majd a -edik oszlop minden -tól különböző elemét. Kicseréljük a -ediket az -edik oszlopra, ezzel létrehozva az egységvektort a megfelelő helyen. Az átalakítás nem változtat a vektorok lineáris függetlenségén és a már meglévő egységvektorokon. Az algoritmust az összes további oszlopra elvégezve kialakítható az egységmátrix, s a determináns a nem nulla kiemelt skalárok szorzata lesz.


- .
- A bizonyítás kulcsa az oszlopvektor alakban történő felírása, majd az axiómák alkalmazása.



- .
- 1. tétel: Egy adott sor szerinti kifejtésnél másik sorhoz tartozó aldeterminánsokat használva azt a látszatot keltjük, mintha a mátrix -edik és -adik sora megegyezne.


9. A determinánsra adott két definíció ekvivalens.
- 6. tétel: Az mátrix determinánsa n-tagú összegként írható fel, amely eggyel kisebb rendű determinánsokból áll. A képletben az összes determinánst bontsuk újabb összegekre, és így tovább. Addig, míg mindegyik alakú nem lesz, melynek értéke már triviálisan az . Összesen lépcsőben kell végrehajtani a kifejtési tételt. Így egy olyan összeget kapunk, amelynek összes tagja az elemek egy produktuma valamilyen előjellel, ahol az elemek egy permutációja. Az összes lehetséges permutációhoz tartozó szorzat pontosan egyszer szerepel az előjeles összegzésben:




- .
- 3.axióma: Cseréljük meg az szorzatokban ugyanazt a két egymás melletti tagot. A csere az iterált kifejtés szemszögéből úgy tűnik, hogy egy olyan mátrixnak határozzuk meg a determinánsát, melyben a -edik és -edik sorok fel vannak cserélve. Az axióma miatt a teljes összeg, s benne a szorzatok előjelet váltanak. Ez összhangban van az elemek permutációjával, s a tagok előjelét az inverziószám paritása adja meg:
- .




- A Leibniz-formulából könnyedén igazolhatóak az axiómák mint a formula elemi tulajdonságai.
10. .

- A Leibniz-formula alakjából következik, hogy nincs semmi különbség sor és oszlop között, mikor a determináns meghatározása a cél. Ennek következménye, hogy az axiomatikus definícióban említett átalakítások és az oszlopokra kimondott tételek sorokra is ugyanúgy érvényesek.
11. ,

- a determinánsok szorzástétele.
12. .

- 11.tétel: .
- Következmény: Ha egy mátrixnak 0 a determinánsa, akkor nem invertálható.

13. .

14. Hasonló mátrixok determinánsa egyenlő.
- .

15. Ha egy négyzetes mátrixnak van n darab sajátértéke, akkor .

- Ha megengedjük a komplex értékeket valós mátrix esetén, a sajátértékek szorzata továbbra is valós marad és ugyanúgy a determinánst adják meg.
16. ,

- a vegyes szorzat és a determináns kapcsolata.
Geometriai jelentése
A vektorok által kifeszített ponthalmazok

2×2-es

3×3-as
Az axiómák szemléltetése

homogenitás

additivitás
A determináns abszolút értéke:
- Az n db n-dimenziós oszlop- vagy sorvektor által kifeszített n-dimenziós paralelepipedon n-dimenziós térfogatát adja meg.
- 2×2-es esetben a vektorok által kifeszített paralelogramma területét,
- 3×3-as esetben a vektorok által kifeszített paralelepipedon térfogatát.
A determináns előjele:
- Az n db n-dimenziós vektorból álló vektorrendszer (rendezett vektor n-es) irányítását/sodrását adja meg.
- Pozitív esetben a vektorok pozitív irányítású/jobbsodrású rendszert alkotnak.
- Negatív esetben a vektorok negatív irányítású/balsodrású rendszert alkotnak.
- Nulla esetén nem értelmezzük az irányítást/sodrást.
Irányítás jelentése:
- Szemléletesen megadja a választ, hogy beforgathatóak-e a vektorrendszer tagjai a kanonikus bázis vektorainak irányába úgy, hogy az elsőt az elsőhöz, i-ediket az i-edikez, stb. forgatjuk, miközben egyik vektor útja sem keresztezheti a többi által kifeszített alteret.
- Ezen feltételek mellett n-dimenzióban n-1 darab vektor mindig összeforgatható, amelyek olyan alteret feszítenek ki, hogy az n-dimenziós teret két részre osztják. Az n. vektor pedig vagy az egyikben vagy a másikban található, így a beforgatása során vagy át kell lépni az alteret vagy sem. Emiatt minden nem nulla dimenzióban két összeforgathatósági osztály létezik. A bázis egyedül azt jelöli ki, melyik osztály tagjait tekintjük pozitív irányítású ill. jobb sodrású rendszereknek. A két osztály egymás tükörképe.
- A fentiekből adódik, hogy n-dimenzióban n-nél kisebb dimenziós alteret kifeszítő vektorrendszer irányítása nem értelmezhető. Nem azonos elemszámú vektorrendszerek párosítása értelmetlen és n darab lineárisan összefüggő vektor a forgatástól függően a bázissal összeforgatható is, meg nem is.
Oszlopok átalakításának értelmezése a térfogat szemszögéből:
- 1. axióma: ha a paralelepipedon egyik oldalának hosszát -szorosára nyújtjuk, akkor térfogata -szeresére nő.
- 2. axióma: ha a paralelepipedont ketté szeljük (egyik oldalával párhuzamosan), akkor a térfogata a szeletek térfogatának (előjeles) összege.
- 3. axióma: a paralelepipedon térfogatának nagysága független az őt leíró vektorok sorrendjétől.
- 4. axióma: az n-dimenziós egységkocka térfogata .



Sorok átalakításának értelmezése a térfogat szemszögéből:
- 1. axióma: ha az egyik bázist -szorosára nyújtjuk, akkor -szeresére nyújtjuk a teret, s benne a test térfogatát.
- 3. axióma: a paralelepipedon térfogatának nagysága független attól, hogy az i-edik koordináták melyik sorban szerepelnek.
- 4. axióma: az n-dimenziós egységkocka térfogata .
Oszlopok átalakításának értelmezése az irányítás szemszögéből:
- 1. axióma: egy vektort ellentétes irányúra változtatva ellentétes irányításúvá válik a rendszer.
- 3. axióma: vektorok sorrendjének cseréje ellentétes irányításúvá teszi a rendszert.
- 4. axióma: a bázist az adott sorrenddel pozitív irányításúnak tekintjük.
Sorok átalakításának értelmezése az irányítás szemszögéből:
- 1. axióma: egyik bázis irányát ellentétesre változtatva az irányításba való besorolás felcserélődik.
- 3. axióma: két bázisvektor sorrendjének megcserélése miatt az irányításba való besorolás felcserélődik.
- 4. axióma: a bázis jelöli ki, melyek a pozitív irányítású rendszerek.
Tételek értelmezése:
- 1. tétel: Elfajuló paralelepipedon esetén egyes élek egy egyenesbe esnek. Ekkor a test lapos, térfogata 0.
- 2. tétel: A test éleivel/oldalaival/alapjával való párhuzamos nyírás nem változtat a térfogaton/magasságon és a körüljáráson.
- 3. tétel: Ha a test egyik éle 0 hosszúságú, térfogata is 0.
- 4. tétel: Az említett átalakítások megőrzik a kifeszített test dimenzióját és az alteret, amelyben fekszik.
- A mátrix rangja adja meg a lineárisan független oszlopvektorok maximális számát, amely egyenlő a kifeszített test, ill. altér dimenziójával. Tehát az átalakítások nem változtatják meg a mátrix rangját. Ezeket a mátrix elemi átalakításainak nevezzük.
- 5. tétel: Lineárisan összefüggő vektorrendszer n-nél kisebb dimenziós testet feszít ki, melynek n-dimenziós térfogata 0.
- A maximális, el nem tűnő aldetermináns rendje adja meg egy mátrix rangját, azaz a kifeszített test pontos dimenzióját. Négyzetes mátrix determinánsa önmagának aldeterminánsa, így értéke meghatározza a rangot.
Lineáris leképezések determinánsa
A mátrixok lineáris leképezést írnak le. A mátrix oszlopai az egységkocka leképezés általi képének éleit adja meg. Négyzetes mátrix esetén a determináns nagysága fejezi ki, hogy hányszorosára nyújtja az elemi cellák térfogatát a leképezés. A determináns előjele pedig megadja, hogy egy lineárisan független vektorrendszer képének irányítása hogyan változik meg az eredetihez képest:
- pozitív: változatlan lesz az irányítása;
- negatív: irányítása ellentétes lesz;
- nulla: vektorrendszer képe összefüggő lesz, melynek így nincs irányítása.
A hasonló mátrixok ugyan azt a lineáris leképezést írják le, csak másik bázisban. Tehát egy lineáris leképezésnek több mátrixreprezentációja létezik. A mátrix a bázissal együtt teljes. Továbbá, négyzetes hasonló mátrixok determinánsa megegyezik. Ez a tény feljogosít arra, hogy egy lineáris leképezés determinánsáról beszéljünk. Általánosan a hasonló mátrixok közös tulajdonságai automatikusan az általuk reprezentált lineáris leképezés tulajdonságai is. Így beszélhetünk egy lineáris leképezés rangjáról, normájáról, nyomáról, sajátértékeiről, sajátvektorairól, karakterisztikus polinomjáról, stb. A matematika nyelvén ezt úgy mondjuk, hogy ezen tulajdonságok a bázistranszformációkkal szemben invariánsak.
Kapcsolata a mátrixok szorzáscsoportjával
Az azonos rendű négyzetes mátrixok szorzása asszociatív és egységelemes, azonban nem minden mátrixnak akad inverze. Az inverzzel rendelkező mátrixok halmaza azonos a nem nulla determinánssal rendelkező négyzetes mátrixok halmazával. A szorzástétel értelmében pedig ez a halmaz zárt a szorzás műveletére.
Az invertálható mátrixok a mátrixszorzás műveletével csoportot alkotnak. A mátrixok által reprezentált transzformációk csoportját általános lineáris csoportnak nevezzük. Jelölése: .

A determinánssal rendelkező mátrixok a fenti csoport részcsoportját alkotják. Jele: . Részhalmaza az ortogonális mátrixok csoportja, amelyek az origó fixpontú távolságtartó és szögtartó transzformációkat írják le (forgatás és tükrözés).


Ezenfelül részcsoportját képezi a determinánsú terület- és irányításmegőrző mátrixok halmaza, a speciális lineáris csoport. Jele: . Részhalmaza a determinánsú ortogonális mátrixok csoportja, amelyek a folytonosan kivitelezhető távolságtartó és szögtartó transzformációkat írják le (forgatás). (A tükrözés megtöri a folytonosságot.)


Általánosítások
- A vegyes szorzat három 3-dimenziós vektor által kifeszített paralelepipedon térfogatának nagyságát adja meg. Előjele jobb sodrású rendszer esetén pozitív, bal sodrású esetén negatív. Akkor és csak akkor 0, ha a vektorok egy síkba vagy egy egyenesbe esnek. Ezek alapján egyértelmű, hogy a determináns ennek a kiterjesztése tetszőleges dimenzióra.
- Itt alapvetően a mátrixok általánosítása történik meg többdimenziós számtömbökké, s a determináns fogalma követi a kiterjesztést.
- Gyűrűk feletti determináns
- A Leibniz-formula alapján a determináns meghatározásához nem kell a multiplikatív művelet invertálhatósága. Ez a tény a fogalom általánosabb bevezetését teszi lehetővé gyűrűk felett, mint például az egész számok vagy polinomok gyűrűje.
Multivektorok leírása
A multivektor a vektor fogalmának egyik irányú általánosítása. Több vektor együtteséből önálló matematikai objektumot alkotva definiáljuk a k-vektorokat, azaz az egyszerű multivektorokat, amelyek a vektorok által kifeszített ponthalmazt jellemzik. Tetszőleges multivektor pedig ezek lineáris kombinációja, azaz nem minden lineáris kombináció k-vektor.
A felépítésükben az ún. ékszorzat segít (). Az ékszorzás egy kétváltozós művelet, amely asszociatív, antikommutatív és bilineáris (az összeadásra vonatkoztatva). Az antikommutativitás miatt . A bilinearitás miatt pedig a multivektorok bázisa az .



Egy k-vektor bázisbeli együtthatói az őt előállító k darab vektor k-dimenziós alterekbe eső komponensei által alkotott vektorrendszer determinánsa. Érthetőbben fogalmazva az együtthatók a k darab vektor által alkotott -s mátrix k-ad rendű aldeterminánsai. Példa:




A k-vektor normája az őt ékszorzással előállító k darab vektor által leírt paralelepipedon k-dimenziós térfogatának a nagysága.
Az egyszerű multivektorok típusai:
- 0-argumentumú ékszorzat eredménye a 0-vektor, a skalár megfelelője;
- 1-argumentumú ékszorzat eredménye az 1-vektor, a vektor megfelelője;
- n-1 darab n-dimenziós vektor ékszorzata a pszeudovektor, együtthatói az általánosított vektoriális szorzat eredménye;
- n darab n-dimenziós vektor ékszorzata a pszeudoskalár, együtthatója a vektorok alkotta négyzetes mátrix determinánsa;
- n-nél több n-dimenziós vektor ékszorzata 0.
Alkalmazása képletekben
- Paralelepipedon térfogata

- A k-dimenziós test k-dimenziós térfogata n-dimenzióban. Az mátrix oszlopai a testet kifeszítő vektorokból áll.

- Invertálható mátrixú lineáris egyenletrendszernek egyértelműen létezik megoldása. A képlettel elkerülhetjük a teljes megoldás kiszámítását, ha csak egy részmegoldásra van szükségünk.
- Vektoriális szorzat 3 dimenzióban

- Vektoriális szorzat általánosan

- A bázisvektorok alkotják az n. oszlop elemeit. Ez szokatlan lehet elsőre, de formailag a szorzás eredményét adja vissza. A bázist tartalmazó oszlopra/sorra alkalmazzuk a kifejtési tételt. Az eredmény koordinátáit a bázisokhoz mint elemekhez tartozó előjeles aldeterminánsok szolgáltatják. Oszlopcserékkel és transzponálással a megszokott alakban is felírható.


- A függvény alatti területet n-dimenziós tégla alapú hasábok térfogatával közelítjük. Pontosabban ezen közelítések határértékeként definiáljuk. Parametrizáció esetén ezen közelítő hasábok alapja deformálódik, a térfogatuk megváltozik, ezért korrekcióra van szükség. Meg kell határoznunk, hogy a paramétertartományban elhelyezkedő n-dimenziós egységkocka adott pont körüli képe milyen a paraméterezett tartományon. A képet a parametrizáció állítja elő. A leképezés adott pontbeli tulajdonságát a derivált, azaz a Jacobi-mátrix jellemzi. A Jacobi-mátrix oszlopvektorai (a paramétervonalak érintői) írják le a deformált egységkocka éleit, melynek irányított térfogata a mátrix determinánsa.

- Nem csak az eredeti mátrix determinánsára van szükségünk. Egy mátrix adjungáltjának előállításához szükségünk van még az elemekhez tartozó aldeterminánsokra is: . (A formula bizonyításához a kifejtési és a ferde kifejtési tétel szükséges.)


- A determináns eredménye n-ed fokú polinomja, a mátrix karakterisztikus függvénye. A polinom gyökei szolgáltatják a sajátértékeket. A Viète-formulákból következik, hogy a mátrix nyoma, és determinánsa, . Valós mátrixok polinomja valós, melyek nem minden esetben bonthatóak fel elsőfokú tényezők szorzatára. Ez magyarázat arra, miért nincs mindig n db (valós) sajátértéke a mátrixnak. Különlegesek a komplex értékű mátrixok, mert az algebra alaptétele szerint mindig van n db komplex gyöke egy komplex polinomnak, így n db sajátértéke, és sajátvektora a komplex mátrixnak.


Kiszámítási módszerek
- Alacsony rendű mátrixok
- 1×1-es mátrix determinánsa maga a szám: .
- 2×2-es mátrix determinánsa: .


- Elemi átalakítások
- A determináns az axiomatikus definíció által biztosított négy szabállyal meghatározható. Cél az egységmátrix kialakítása. Felhasznált tételek a 2. és 10. tétel. Két kimenetele van:
- Sikerül előállítani az egységmátrixot, melynek már ismert a determinánsa ( 4. axióma).
- Kialakítunk egy nullvektort vagy sorban vagy oszlopban, mely mátrixnak szintén ismert a determinánsa ( 3. tétel).
- Paraméteresen levezetni az eredményt nehéz és csak elbonyolítja a feladatot. Konkrét számításoknál alkalmazható jól.


- Első példa:


- Második példa:


- Meghatározhatóak a következőek is:
- Rang: Az átalakítás során a megjelenő nullvektorokkal nem foglalkozunk és addig alakítjuk tovább a mátrixot, amíg minden sor/oszlop vagy lenullázódik vagy megjelenik benne egy bázisvektor. Egy teljes vagy hiányos egységmátrix kialakítása a cél. A bázisok száma adja meg a mátrix rangját. (Nem kvadratikus mátrixok esetén is így kell.)

- Inverz mátrix: A determináns meghatározásakor az egységmátrix eljutásáig alkalmazott lépéseket ugyanabban a sorrendben alkalmazva az egységmátrixon az eredeti mátrix inverz mátrixát kapjuk. (Nulla determináns esetén nem tudunk eljutni az egységmátrixhoz.)

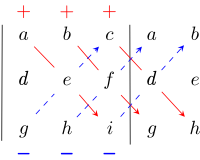
- A determinánst egyik sorához/oszlopához tartozó előjeles aldeterminánsaira vezetjük vissza. A módszer iterálása a Leibniz-formulához vezet. Segédmódszere, hogy minél több 0-t tartalmazó sort/oszlopot válasszunk, így kevesebb tagú összeget kell felírni.
![{\displaystyle {\begin{aligned}|A|={\begin{vmatrix}a&b&c\\d&e&f\\g&h&i\end{vmatrix}}&=a\,{\begin{vmatrix}\Box &\Box &\Box \\\Box &e&f\\\Box &h&i\end{vmatrix}}-b\,{\begin{vmatrix}\Box &\Box &\Box \\d&\Box &f\\g&\Box &i\end{vmatrix}}+c\,{\begin{vmatrix}\Box &\Box &\Box \\d&e&\Box \\g&h&\Box \end{vmatrix}}\\[3pt]&=a\,{\begin{vmatrix}e&f\\h&i\end{vmatrix}}-b\,{\begin{vmatrix}d&f\\g&i\end{vmatrix}}+c\,{\begin{vmatrix}d&e\\g&h\end{vmatrix}}\\[3pt]&=aei+bfg+cdh-ceg-bdi-afh.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/14f2f2a449d6d152ee71261e47551aa0a31c801e)
- Felhívja a figyelmet egy geometriai mintázatra, így kevesebb számítás szükséges a determinánshoz. Csak 3×3-as mátrixnál alkalmazható, ill. 3×3-as aldetermináns meghatározásánál. Leibniz-formula 3×3-as mátrixra vonatkozó esete.
-



- Elméleti jelentősége a determináns paraméteres leírásából adódik. Gyakorlati szempontból a determináns eme definíciója nehezen kezelhető, hiszen bár 2×2-re és 3×3-ra léteznek egyszerű kiszámítási módok, a magasabb rendűekre még nem találtak ilyet. A definícióból történő kiszámítás már -re is tagot eredményez, esetben pedig már -at, ugyanis a szumma tagszáma .





- Háromszögmátrix, diagonális mátrix determinánsa a főátlóban lévő elemek szorzata. Nem trianguláris mátrixból a determináns változását szem előtt tartva Gauss-eliminációval mindig kialakíthatunk egy ilyen mátrixot. Ez tekinthető az elemi módszer speciális esetének.

- A 4×4-esnél nagyobb mátrix esetén a mechanikus kiszámítás túl sok művelettel jár, ezért az ún. LU felbontást használják. A módszer a determinánsok szorzástételére és a háromszögmátrixokra épül.
Számítási példák
- 2×2
- Kifejtési tétel/Leibniz-formula következtében:

- A és a vektorok által leírt paralelogramma területének nagysága 13 egység. A vektorok balsodrású rendszert alkotnak 2-dimenzióban.


- 3×3
- Gauss-eliminációval háromszögmátrix kialakítása:

- 4×4
- Ebben az esetén hatékony eljárás a kifejtési tétel alkalmazása a mátrix valamelyik sorára vagy oszlopára, majd a tétel további alkalmazása helyett a Sarrus-szabály alapján számoljuk ki az aldeterminánsokat. A példában a mátrix első sora szerint történik a kifejtés:


Hivatkozások
- A. G. Kuros: Felsőbb algebra, Tankönyvkiadó, Budapest, 1975
- Wettl Ferenc: Lineáris algebra
 Matematika-portál • összefoglaló, színes tartalomajánló lap
Matematika-portál • összefoglaló, színes tartalomajánló lap






