Comportamento simile di alcune funzioni (trigonometriche) per x tendente a 0.
L'approssimazione per angoli piccoli consiste nel semplificare le funzioni trigonometriche di base a funzioni più semplici quando l'angolo è molto piccolo e tende a zero. L'approssimazione si basa sugli sviluppi di Taylor-MacLaurin troncati al secondo ordine. Si ha:[1][2]
dove è l'angolo in radianti.
Questa approssimazione è utile in molti ambiti di fisica e di ingegneria, tra cui meccanica, elettromagnetismo, ottica, e così via.
Indice
1Spiegazione
1.1Grafica
1.2Geometrica
1.3Algebrica
1.4Analisi
2Errori nell'approssimazione
3Utilizzi specifici
3.1Moto di un pendolo
4Note
5Bibliografia
6Collegamenti esterni
Spiegazione
Grafica
Figura 1. Paragone tra le funzioni trigonometriche dispari. Si vede che migliora l'approssimazione man mano che l'angolo si avvicina a 0.
Figura 2. Paragone tra la funzione coseno e la funzione 1- θ^2/2. Si vede che migliora l'approssimazione man mano che l'angolo si avvicina a 0.
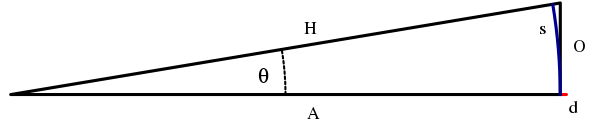
Geometrica
La parte in rosso, , è la differenza tra l'ipotenusa e il cateto Questa differenza è piccola e, poiché , si ha che il coseno è molto vicino a 1 e più precisamente
L'altro cateto, , è circa uguale all'arco in blu, . Per la definizione di radiante, si ha
Poiché inoltre
e dalla figura è facile notare come e , si giunge dunque alla seguente conclusione.
Algebrica
Approssimazione per piccoli angoli della funzione seno.
Gli sviluppi in serie di MacLaurin delle funzioni trigonometriche sono i seguenti:[3]
Nel primo caso, si nota che già il secondo termine decresce come il cubo del primo; quindi per valori abbastanza vicini a zero, come 0,01, il secondo termine e i successivi diventano molto piccoli, quindi trascurabili:
Pertanto, il seno di un angolo piccolo può essere approssimato al primo termine, cioè all'angolo stesso. Lo stesso ragionamento può essere applicato anche al coseno e alla tangente; ne segue che il coseno di un angolo piccolo è circa 1 e la tangente, rapporto tra seno e coseno, per angoli piccoli si comporta come il rapporto tra un angolo e 1; in conclusione, si hanno le seguenti equivalenze asintotiche:
Analisi
Si può dimostrare, con il teorema del confronto, che[4]
Allora si può dire che, per :
Le precedenti approssimazioni si possono esprimere anche come
Errori nell'approssimazione
Figura 3. Grafico degli errori relativi dell'approssimazione per angoli piccoli.
La figura 3 mostra gli errori relativi dovuti a questa approssimazione. Gli angoli ai quali l'errore relativo supera l'1% sono i seguenti:
Utilizzi specifici
Moto di un pendolo
L'approssimazione del seno consente di semplificare il calcolo del periodo di un pendolo semplice. Ciò rende il moto del pendolo un moto armonico semplice.
Note
^(EN) Charles H. Holbrow e al., Modern Introductory Physics, 2ª ed., Springer Science & Business Media, 2010, pp. 30-32, ISBN 0387790799.
^(EN) Micheal Plesha et al., Engineering Mechanics: Statics and Dynamics, 2ª ed., McGraw-Hill Higher Education, 2012, p. 12, ISBN 0077570618.
^(EN) Mary L. Boas, Mathematical Methods in the Physical Sciences, Wiley, 2006, p. 26, ISBN 978-0-471-19826-0.
^(EN) Ron Larson et al., Calculus of a Single Variable: Early Trascendental Functions, 4ª ed., Cengage Learning, 2006, p. 85, ISBN 0618606254.
Bibliografia
Tom Apostol, Calcolo 1, 9ª ed., Bollati Boringhieri, 1987 [1977], ISBN 88-339-5033-6.



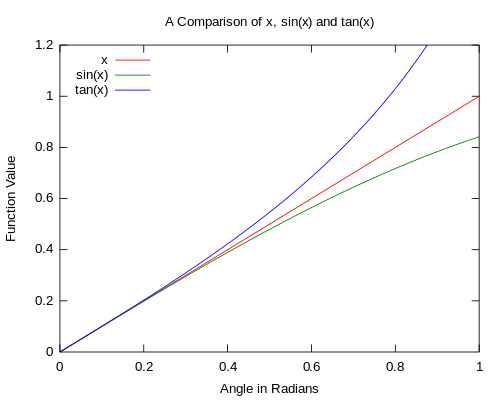 Figura 1. Paragone tra le funzioni trigonometriche dispari. Si vede che migliora l'approssimazione man mano che l'angolo si avvicina a 0.
Figura 1. Paragone tra le funzioni trigonometriche dispari. Si vede che migliora l'approssimazione man mano che l'angolo si avvicina a 0. Figura 2. Paragone tra la funzione coseno e la funzione 1- θ^2/2. Si vede che migliora l'approssimazione man mano che l'angolo si avvicina a 0.
Figura 2. Paragone tra la funzione coseno e la funzione 1- θ^2/2. Si vede che migliora l'approssimazione man mano che l'angolo si avvicina a 0.

























 Portale Matematica: accedi alle voci di Wikipedia che trattano di matematica
Portale Matematica: accedi alle voci di Wikipedia che trattano di matematica










