Łańcuch kinematyczny – część mechanizmu w postaci kilku połączonych ze sobą członów tworzących jedną lub wiele par kinematycznych[1], realizujący zdefiniowane przeniesienie ruchu.
Łańcuchy kinematyczne dzielą się na:
kinematyczne płaskie,
kinematyczne przestrzenne.
Własności ogólne
Podstawową cechą łańcucha kinematycznego jest jego ruchliwość. Ruchliwość określa ile stopni swobody posiada łańcuch, to znaczy ile różnych typów ruchu jest w stanie przenieść.
Ruchliwość może być:
lub
– łańcuch sztywny
– łańcuch normalny
– łańcuch swobodny
Ruchliwość łańcucha oblicza się ze wzoru strukturalnego (kryterium Czebszowa–Grüblera–Kutzbacha):
dla łańcucha przestrzennego:
uwaga: od liczby ogniw odejmuje się 1 w przypadku, gdy nie zalicza się do niej nieruchomej podstawy.
dla łańcucha płaskiego:
gdzie:
– liczba ogniw,
– ilość par kinematycznych -tej klasy.
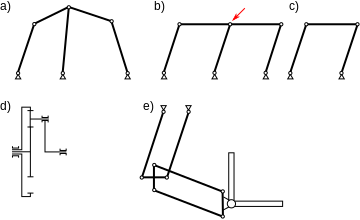
Interpretacja ruchliwości obliczonej ze wzoru strukturalnego wymaga pewnego doświadczenia, w szczególności gdy wskazuje on, iż łańcuch kinematyczny jest sztywny. Taka sytuacja jest oczywista w przypadku a. W pewnych przypadkach jednak, przy szczególnej geometrii, łańcuch teoretyczne sztywny może przenosić ruch (przypadek b). Strukturalnie jest on identyczny z a, lecz występują w nim trzy geometrycznie identyczne człony co umożliwia ruch łańcucha. Para kinematyczna, która powinna łańcuch usztywniać (wskazana czerwoną strzałką) jest węzłem biernym. Projektując mechanizm z węzłami biernymi, konstruktor musi zdawać sobie sprawę, że zużycie elementów mechanizmu, prowadzące do drobnych zmian w ich geometrii, może doprowadzić do usztywnienia mechanizmu. Łańcuch kinematyczny sztywny, aczkolwiek teoretycznie takim jest w praktyce jest stosowany jako konstrukcja służąca wyłącznie do przenoszenia obciążenia, a nie ruchu i nie jest przedmiotem teorii mechanizmów i maszyn, lecz wytrzymałości materiałów i teorii konstrukcji.
Łańcuch kinematyczny o ruchliwości równej jeden jest najczęstszym przypadkiem mechanizmu. Rodzaj ruchu członu czynnego determinuje wtedy ruch członu biernego i wszystkich członów pośredniczących. Rysunek c pokazuje typowy czworobok przegubowy o ruchliwości równej jeden.
W pewnych przypadkach wymagane jest by mechanizm miał większą ruchliwość. Typowym tego przykładem jest przekładnia obiegowad, lub mechanizm kreślarski e. Istnieją przypadki, że w bardzo odpowiedzialnych mechanizmach powiększa się ruchliwość normalnie zabezpieczoną bezpiecznikiem, by uniknąć samousztywnienia się mechanizmu w wyniku zużycia lub odkształcenia elementów. Gdy sytuacja taka zaistnieje bezpiecznik uruchamia dodatkową parę. Mechanizm może wtedy stracić swoją funkcjonalność, lecz unika się wtedy trwałego zniszczenia mechanizmu lub środowiska w jakim pracuje.
Analiza ruchliwości
Badanie ruchliwości łańcucha kinematycznego może być przeprowadzone analitycznie. Ograniczając analizę do przypadku łańcuchów płaskich (dwuwymiarowych) założymy, że jego ogniwa są prętami prostymi, odkształcalnymi osiowo i połączonymi ze sobą w węzłach za pomocą idealnych przegubów. Do rozważań wprowadzimy dwa wektory
W celu uproszczenia zapisu wektory będziemy zapisywali albo wierszowo albo kolumnowo jeżeli nie będzie to prowadziło do nieporozumień.
Analiza ruchliwości węzłów łańcucha polega na badaniu rozwiązań układu równań
(a)
Macierz zgodności przemieszczeń węzłowych występująca w tym równaniu, może być utworzona na podstawie interpretacji jej kolumn. Rozważmy mianowicie węzeł łańcucha, w którym występują dwa przemieszczenia i (rys. 1a-b). Związek (a) przyjmuje dla tego przypadku postać
Rys. 1a-b – warunki zgodności przemieszczeń węzłowych
Elementy są wydłużeniami/skróceniami odpowiednio -tego, -tego i -tego elementu ogniwa łańcucha, spowodowanymi przez -te przemieszczenie węzłowe (rys. 1a). Analogicznie elementy są skutkami spowodowanymi przez przemieszczenie węzłowe (rys. 1b). Elementy są sumarycznymi skutkami równoczesnego działania przemieszczeń i
Jeżeli wydłużeniom ogniw przypiszemy znak plus, a skróceniom – minus, to na podstawie rys. 1a-b otrzymamy
– (rys. 1a),
– (rys. 1b).
W rzeczywistym łańcuchu kinematycznym jego ogniwa mają niezmienną długość, a to znaczy, że Badaniu ruchliwości łańcucha kinematycznego należy więc poddać nie układ równań (a), lecz (b)
(b)
Z algebry liniowej wiadomo, że liczba liniowo niezależnych niezerowych rozwiązań takiego układu równań jest równa defektowi badanej macierzy. Pod tym terminem rozumiemy różnicę pomiędzy stopniem, a rzędem macierzy. W przypadku macierzy prostokątnych o rozmiarach stopniem nazwiemy mniejszą z liczb i
Przykład 1
Dla przykładu rozważymy układ pokazany na rys. 2a[2].
Na podstawie rys. 2b-f kolejno budujemy kolumny macierzy
Łatwo można sprawdzić, że przyjęcie pozwala wyznaczyć jednoznacznie wartości pozostałych niewiadomych przemieszczeń węzłowych, które wynoszą:
Dla łańcucha o pionowych „słupkach” otrzymuje się
Dla łańcucha o „słupkach” równoległych jest
Dla łańcucha z „ryglem” poziomym
Przykład 2
W przypadku łańcuchów wielokrotnie przesuwnych sprawa nieco się komplikuje co zilustrujemy na przykładzie łańcucha „piętrowego” z rys. 3a[2]. Wygenerowana kolumnowo macierz zgodności przemieszczeń węzłowych ma postać
Rys. 3a – schemat łańcucha o ruchliwości w=2. Rys. 3b-c – dwa rodzaje przemieszczeń bazowych. Rys. d – nowy rodzaj przemieszczenia (przykładowa kombinacja liniowa).
Rozwiązując układ równań za pomocą algorytmu Gaussa-Jordana z pełnym wyborem elementów wiodących stwierdzamy, że ma on rozwiązanie
Oznacza to, że przemieszczenia i mogą spełniać rolę zmiennych swobodnych. Dzięki temu otrzymujemy w tym przypadku dwa rozwiązania podstawowe (bazowe)
Dowolna kombinacja liniowa tych rozwiązań o postaci
jest nowym rozwiązaniem równania
Na rys. 3b-c pokazano mechaniczne interpretacje rozwiązań bazowych i natomiast rys. 3d przedstawia przykładowe nowe rozwiązanie w postaci najprostszej kombinacji liniowej
Przykład 3
Generowanie macierzy zgodności przemieszczeń węzłowych można przeprowadzić według takiego algorytmu postępowania, który bez żadnych zmian pozwala analizować ruchliwość zarówno łańcuchów płaskich, jak i przestrzennych. Podstawą tego algorytmu jest spostrzeżenie, że zmiana długości ogniwa wywołana jednostkowym przemieszczeniem węzła wyraża się prostym iloczynem skalarnym
(c)
w którym przez oznaczono wersor kierunku ogniwa, a przez wersor kierunku przemieszczenia węzłowego.
Znak we wzorze (c) przypiszemy według następującego kryterium:
(A) – gdy ogniwo ma kierunek „do węzła” wtedy we wzorze (c) obowiązuje znak plus. Dla ogniwa skierowanego „od węzła” przypiszemy znak minus. To kryterium znakowania we wzorze (c) wymaga przyporządkowania każdemu ogniwu konkretnego wersora kierunku
W celu uproszczenia zapisu będziemy operować tylko tymi wektorami dwuwymiarowymi, które mają co najmniej jedną współrzędną niezerową (rys. 2a).
I tak dla łańcucha z przykładu 1 mamy
oraz
Na podstawie wzoru (c) otrzymujemy
Po obliczeniu iloczynów skalarnych możemy stwierdzić, że otrzymany wynik jest identyczny z uzyskanym w przykładzie 1.
Rys. 4a – przestrzenny łańcuch kinematyczny
Stosując to wektorowe podejście przeprowadzimy teraz analizę łańcucha przestrzennego z rys. 4a. Jedyna różnica będzie polegać tylko na tym, że wektory i będą teraz miały po trzy współrzędne.
Współrzędne wersorów dla poszczególnych ogniw można obliczyć na podstawie geometrii układu określonej wysokością i połową przekątnej kwadratowej podstawy
Elementy macierzy obliczamy na podstawie wzoru (c) z przypisaniem znaków według kryterium (A):
(d)
Rozważymy teraz kilka różnych przypadków:
Przypadek 1
Załóżmy, że Oznacza to, że węzły B i C są unieruchomione i układ równań ma w tym przypadku postać
Łatwo można sprawdzić, że istnieje taki minor macierzy że Wynika stąd wniosek, że jedynymi rozwiązaniami równania są w tym przypadku Oznacza to, że unieruchomienie węzłów B i C powoduje unieruchomienie całego łańcucha (brak ruchliwości).
Przypadek 2
Uwzględnimy teraz występowanie w węzłach B i C przemieszczeń tylko w kierunku osi tzn. przyjmiemy, że Wynika stąd taka postać układu równań
(e)
Przyjmijmy, że zostało wywołane przemieszczenie Przyjęcie to umożliwia jednoznaczne rozwiązanie układu równań (e)
co oznacza, że łańcuch ma jeden stopień swobody ruchu.
Przypadek 3
Przy tym samym założeniu co w przypadku 2, tzn. że wymusimy przemieszczenie I tym razem istnieje jednoznaczne rozwiązanie
Obydwa rozwiązania z przypadków 2 i 3 różnią się tylko stałym mnożnikiem co tylko potwierdza podobieństwo obu stanów przemieszczenia w układzie o jednym stopniu swobody ruchu.
Algorytm alternatywny
Przytoczymy teraz inny, statyczny sposób generowania macierzy Skorzystamy w tym celu z równań równowagi węzłów wyciętych z łańcucha, które można zapisać w postaci
(f)
przy czym
– jest wektorem sił osiowych w ogniwach, a
– wektorem sił węzłowych.
Rys. 5a-b – Statyczny wariant analizy ruchliwości łańcucha kinemtycznego
Dla przykładu rozważymy równanie równowagi sił działających na wycięty węzeł (rys. 5a) w kierunku określonym przez jego wersor Równanie to otrzymamy sumując rzuty na ten kierunek wszystkich sił
Podobnie mamy dla kierunku (rys. 5b)
Dla łańcucha o ogniwach i liniowo niezależnych przemieszczeniach węzłowych macierz możemy zapisać w postaci
która jednak nie uwzględnia znakowania określonego przez kryterium (A).
Analogicznie możemy napisać na podstawie wzoru (c)
Wobec tego, że elementy oraz macierzy i spełniają związki
otrzymujemy istotny związek
pozwalający generować elementy macierzy na dwa równorzędne sposoby.
Zobacz też
rigging
Przypisy
↑A. Gawęcki, Podstawy mechaniki konstrukcji prętowych, Wyd. Politechniki Poznańskiej, Poznań 1985.
↑ abB. Olszowski, M. Radwańska, Mechanika budowli, t. 1, s. 147, Kraków 2010, Wyd. Politechniki Krakowskiej.









![{\displaystyle \mathbf {d} =[d_{1},d_{2},\dots ,d_{m}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/19d3e279f5764c43f6b023efa5dde5ee30b9db0d)
![{\displaystyle \mathbf {s} =[s_{1},s_{2},\dots ,s_{n}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/01eadefd8bb7ec3f8e4852e0cd11f2efe87f2b53)













































![{\displaystyle \mathbf {d_{1}^{*}} =[1\;0\;1\;0\;0\;0\;0\;0],\quad \mathbf {d_{2}^{*}} =[0\;0\;0\;0\;1\;0\;1\;0].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e82497adfe7e48c30937e9b5e116289b01b39536)




![{\displaystyle \mathbf {d_{3}^{*}} =\mathbf {d_{1}^{*}} +\mathbf {d_{2}^{*}} =[1\;0\;1\;0\;1\;0\;1\;0].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8905b97176fce9df52dc17b848d99b791a45963e)







![{\displaystyle {\vec {e}}_{1}=[\sin(\alpha ),\;-\cos(\alpha )],\qquad {\vec {e}}_{2}=[\cos(\beta ),\;-\sin(\beta )],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6ba87fc2b229804f3d7a318dc1bac9d8e86b00e7)
![{\displaystyle {\vec {e}}_{3}=[\sin(\gamma ),\;\cos(\gamma )],\qquad {\vec {e}}_{4}=[\cos(\beta ),\;-\sin(\beta )]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/db565e5cd4f057b87c9c58a9c6ef2635a6c5058e)
![{\displaystyle {\vec {d}}_{1}=[1,\;0],\quad {\vec {d}}_{2}=[0,\;1],\quad {\vec {d}}_{3}=[1,\;0],\quad {\vec {d}}_{4}=[0,\;1],\quad {\vec {d}}_{5}=[\cos(\beta ),\;-\sin(\beta )].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ccc6fe32e5930e3037d9a9bae609774940000368)




![{\displaystyle {\vec {e}}_{1}=[-1/2\;\;1/2\;\;{\sqrt {2}}/2],\quad {\vec {e}}_{2}=[-1/2\;\;-1/2\;\;{\sqrt {2}}/2],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7cbe90e4e38198585ae03ca496411fd5e32cb378)
![{\displaystyle {\vec {e}}_{3}=[1/2\;\;-1/2\;\;{\sqrt {2}}/2],\quad {\vec {e}}_{4}=[1/2\;\;1/2\;\;{\sqrt {2}}/2],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/92e6aef50db48b0e57ce28794233d46593548c7a)
![{\displaystyle {\vec {d}}_{1}=[1\;\;0\;\;0],\quad {\vec {d}}_{2}=[0\;\;1\;\;0],\quad {\vec {d}}_{3}=[0\;\;0\;\;1],\quad {\vec {d}}_{4}=[1\;\;0\;\;0],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/cb3b9e6375940ad70d3ed2ec5567b5ba83eb3c4e)
![{\displaystyle {\vec {d}}_{5}=[0\;\;1\;\;0],\quad {\vec {d}}_{6}=[1\;\;0\;\;0],\quad {\vec {d}}_{7}=[0\;\;1\;\;0].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2c4208ef5b907d4b24cf10721b2f2d2c70d8d452)










![{\displaystyle \mathbf {d} =[d_{1}\;\;d_{2}\;\;d_{3}\;\;d_{5}\;\;d_{7}]=[0\;\;\;1/2\;\;-{\sqrt {2}}/4\;\;\;1\;\;\;1],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/004a44d7d52262975b3c025a3455ec33a0eae85c)


![{\displaystyle \mathbf {d} =[d_{1}\;\;d_{2}\;\;d_{3}\;\;d_{5}\;\;d_{7}]=[0\;\;-{\sqrt {2}}\quad 1\;\;-2{\sqrt {2}}\;\;-2{\sqrt {2}}].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a672651167fddc7b78b78331fa2f06528fe3efbd)


![{\displaystyle \mathbf {S} =[S_{1},S_{2},\dots ,S_{n}]\quad {}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2add50491f58bddbf21071165197561b2f7e2f80)
![{\displaystyle \mathbf {D} =[D_{1},D_{2},\dots ,D_{m}]\quad {}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bd0c9a69958dbf03a885653431e2fa68802dca26)






















