Perspektywa krzywoliniowa

Perspektywa krzywoliniowa (perspektywa sferyczna) – forma odwzorowania przestrzeni na płaszczyźnie stosowana do przedstawienia obiektów trójwymiarowych w dwóch wymiarach, linie w rzeczywistości proste wydają się być wtedy krzywe.
Perspektywa krzywoliniowa formalnie ustalona została w 1968 przez artystę i historyka sztuki Alberta Flocona i rytownika–grafika André Barre’a, autorów książki La Perspective curviligne[1], którą przetułmaczono na język angielski w 1987 pt Curvilinear Perspective: From Visual Space to the Constructed Image i opublikowano na łamach University of California Press[2].
Horyzont i punkty zbiegu
 |  |
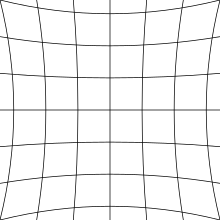
System ten posługuje się łukami do kreślenia obrazu o wiele bardziej zbliżonego do tego generowanego przez oko, niż to jest w przypadku tradycyjnej perspektywy linearnej, która wykorzystuje jedynie linie proste i prowadzi do dziwnych zniekształceń na brzegach. Do kreślenia łuków używa się czterech lub pięciu punktów zbiegu:
- W perspektywie z pięcioma punktami zbiegu (typu rybie oko) punkt zbiegu Z znajduje się pośrodku okręgu, a cztery pozostałe N, S, W i E są umiejscowione na jego krawędzi.
- Takie przedstawienie przestrzeni jest najbardziej zbliżone do obrazu jaki generuje ludzkie oko.
Geometryczna zależność
 |
Odległości a i c między obserwatorem a ścianą są większe niż odległość b, w związku z czym przyjmując zasadę, iż obiekt znajdujący się dalej od obserwatora, jest dla niego mniejszy, ściana powinna być zniekształcona i zmniejszona przy krawędziach.
 |
Definicja matematyczna
Jeżeli punkt posiada współrzędne 3W w układzie kartezjańskim


Transformacja tego punktu do krzywoliniowego układu odniesienia o promieniu jest następująca:



Przykłady
- Edward Lear – Choropiskeros, Kolfu, 1856
- David Hockney – Siedząc w ogrodzie Zen przy świątyni Rioanji 1983
- Carel Weight – Chwila, 1955
- Stanley Spencer – Napełnianie butelek wodą, 1923–1932
Zobacz też
- perspektywa
- perspektywa linearna
- perspektywa odwrócona
- perspektywa powietrzna
- perspektywa renesansowa
Linki zewnętrzne (w języku angielskim)
- Rysowanie Komiksów – 5 Punktów Zbiegu
- House of Stairs. worldofescher.com. [zarchiwizowane z tego adresu (2018-08-24)]. autorstwa M.C. Escher
Przypisy
- ↑ Albert Flocon and André Barre, La Perspective curviligne, Flammarion, Éditeur, Paris, 1968.
- ↑ Albert Flocon and André Barre, CurvilinearPerspective: From Visual Space to the Constructed Image (Robert Hansen, translator), University of California Press, Berkely and Los Angeles, California, 1987 ISBN 0-520-05979-4.









