Veículo subaquático autônomo

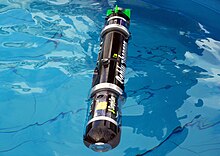
Um veículo subaquático autônomo (em inglês autonomous underwater vehicle, sigla AUV) é um tipo de robô ou sistema mecatrônico que viaja embaixo da água como um submarino, com a particularidade de não necessitar de um piloto humano, possuindo uma autonomia limitada.[1]. A autonomia de um AUV, será definida por um sistema computacional programável próprio, cuja missão ou padrão de comportamento e atuação autônoma serão programados por uma pessoa (especialista) ou uma equipe, que define assim a missão do AUV como um conjunto de tarefas a serem realizadas. Em português, ainda podemos encontrar algumas outras traduções para o acrônimo AUV como "veículos submarinos autônomos", "veículos autônomos subaquáticos" e "veículos autônomos submersos".
Classificação
Os AUVs constituem parte de um grande grupo de sistemas submarinos conhecidos como unmanned underwater vehicle ("veículo não-tripulado subaquático"), uma classificação que inclui também submarinos não autônomos remotely operated underwater vehicles (ROVs) ("veículos subaquáticos controlados remotamente"), controlados e alimentados a partir da superfície por um operador/piloto através de um fio (também chamado "cordão umbilical"), ou através de um controle remoto.[2]
Ver também
- Planador subaquático
- Submarino
- Submersível
- Veículo submarino operado remotamente
Referências
Ligações externas
- Revista FAPESP: Poli-USP desenvolve veículo autônomo subaquático
 | Este artigo sobre robôs é um esboço. Você pode ajudar a Wikipédia expandindo-o.
|
 Portal da robótica
Portal da robótica Portal da tecnologia
Portal da tecnologia













